-
作者简介:
刘力权,沈阳建筑大学建筑学学士,研究生阶段于伦敦巴特莱特建筑学院进行交互建筑领域VRAR空间感知算法研究,在团队中进行场景设计与交互行为研究设计并负责后期影视制作。TAG 工作室联合创始人。对VRAR交互设计与交互装置在建筑,场所与人的互动可能性有浓厚兴趣,并致力于推动交互建筑概念在国内的传播与项目发展。
彭俊熙,深圳大学建筑学学士,伦敦学院大学巴特莱学院建筑学硕士, VR/AR和 UI/UX设计师,致力于 VR/AR空间感知扩大算法研究与实践。连客科技创始人,连客为深圳软件开发团队,曾执行服务深圳时装周电子系统,深圳电信客户系统等大型项目。
黄佳胜,武汉理工大学建筑学学士,巴特莱特学院建筑学硕士,现致力于VR/AR环境中空间感知扩大算法的创造与研发。擅长在项目的研究与开发阶段结合理论知识进行创新性算法设计,乐于发现、分析、解决问题。

导师:Ruairi Gylnn:IALab(Interactive Architecture Lab)的创始人。同时也是巴特莱特建筑学院新专业Design For Performance And Interaction的领头人,RC3的Big Brother。
Matt Jacobs:著名设计创意公司Nexus Studio的技术和创意总监,与Google,Microsoft,Apple,IBM公司有密切的合作关系。是Simulacrum项目的第一责任导师。
项目背景:
人们通过感官来认知周围的世界,去识别与学习,以建立对真实的理解。而当我们的认知可以交由计算机托管,我们是否可以感知到不一样的空间状态和空间使用方式呢?在当下物理空间越来越紧张,人口密度越来越高的背景下,是否可以借助虚拟/混合/增强现实的技术来拓展我们对于空间的使用方式、利用效率和认知方法,是我们十分感兴趣的课题。
虚拟现实的到来,使用户可以在有限的物理空间内获得更大空间尺度的虚拟体验。但因为物理空间的限制,为了连接有限的物理空间和更大的虚拟空间,非真实的行走交互方式被普遍使用。比如使用手柄移动或使用类跑步机式机械装置移动的方法。这些替代方法迫使我们放弃自然行走的方式而去适应新的移动交互,并不能够提供自然且连续的沉浸体验。
为了解决这个问题,我们开发了一套混合现实重定向行走算法。它可以通过对人的视觉误导,以真实行走的方式,使人们在有限的物理空间中体验到无限大的虚拟空间 。

这种方法既提供了虚拟空间的丰富内容,也保留了用户在物理空间中的行走习惯,从而达到混合虚拟与物理空间的目的。
除此之外,这种混合现实空间还具有以下特点:
一方面,用户可以在这个空间中真实行走 (real walking),并自由选择行走的方向。目前,此算法可以实现从4m*8m的物理空间到无限大的虚拟空间的映射。之所以选择4×8米,是因为这是目前硬件水平能达到的最大极限,理论上更大的空间可以让参与者获得更稳定和更不易察觉这种视觉误导的体验。
另一方面,这种混合现实空间也可以提供真实的触感反馈。
具体来说,我们可以通过以下步骤来实现这种映射:
首先,对物理空间进行扫描以确定空间大小和空间边界的形状,并将物理空间进行分割,使之成为两个(或以上)不同的物理空间单元,以适应算法对空间映射的尺寸要求。

然后,对于分割出来的物理空间单元,以空间的中心点为原点建立极坐标系。根据空间单元中每个点的坐标值,计算出在该点物理空间与虚拟空间之间的偏转值,利用这些偏转值的累加将有限的物理空间单元映射到一个更大的虚拟空间单元。放大后的虚拟空间单元的形状和放大倍率可以根据需求进行调整。通过两个物理空间单元之间特定的切换方法,可以让用户在无限个虚拟空间单元之间无缝行走,以达到有限物理空间映射到无限虚拟空间的目的。
接下来,以设计所需要的目标虚拟空间为基础,去选择不同的映射方法。这样可以在保证虚拟空间可自由设计的前提下,仍然能够建立与物理空间匹配的映射。
最终,这种预先设计好的映射方法会在用户体验的过程中实时计算出使用者的虚拟位置信息,并渲染出相应的视觉听觉内容,确保物理空间和虚拟空间的的同步关系,以提供混合现实空间的体验。
空间应用:
在我们开发算法的同时,我们也同时意识到,我们必须把算法转化为实际的空间,和体验内容,来让算法真正动起来,并且在体验,反馈,优化,再设计这样的流程中反复操作,来理解我们算法的潜力,挑战和问题所在。我们不仅要作为理论研究和算法开发者去考虑问题,更要从可能需要我们的算法来设计内容的设计师的角度去换位思考,想象他们可能会需要算法提供什么样的自由度,什么样的空间和功能。由于我们现阶段只有三个人,因而决定身兼二职,双线操作……
我们定位了几种可能的应用领域,其中有展览空间,游戏场景,心理治疗,建筑空间可视化。
在以上空间应用的场景中,我们先后选择了展览空间与游戏场景进行体验。
展览空间的设计我们经历了两个阶段。
2D空间放大阶段:
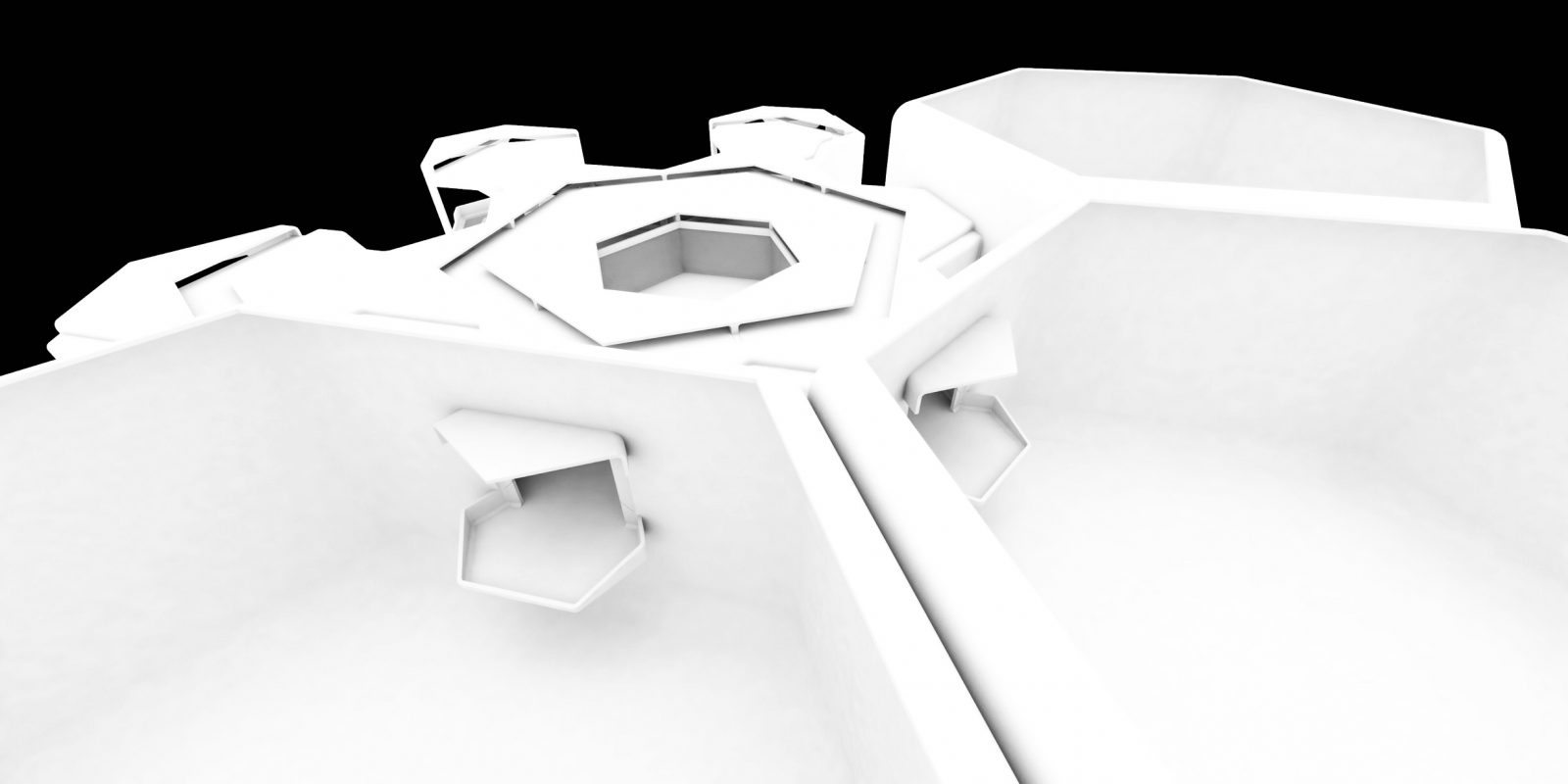
此阶段我们将4×8米的空间映射成为了六个六边形首尾相接的单层空间,做成了一个有中庭的放大空间序列,体验者在虚拟空间中可实际走动的面积大小约为130平方米,在每一个六边形空间的中心我们布置了一个展台,可以放置任意的展品,中庭则可以根据设计者的喜好,填充不同的内容,比如枯山水,一棵树(请不要嫌弃它老掉牙),或者春夏秋冬。总而言之,在我们的第一个阶段,算法生成的六边形空间只是一个设计框架,具体的空间细节和体验内容设计事实上是可以由空间使用者来进行主观设计的。
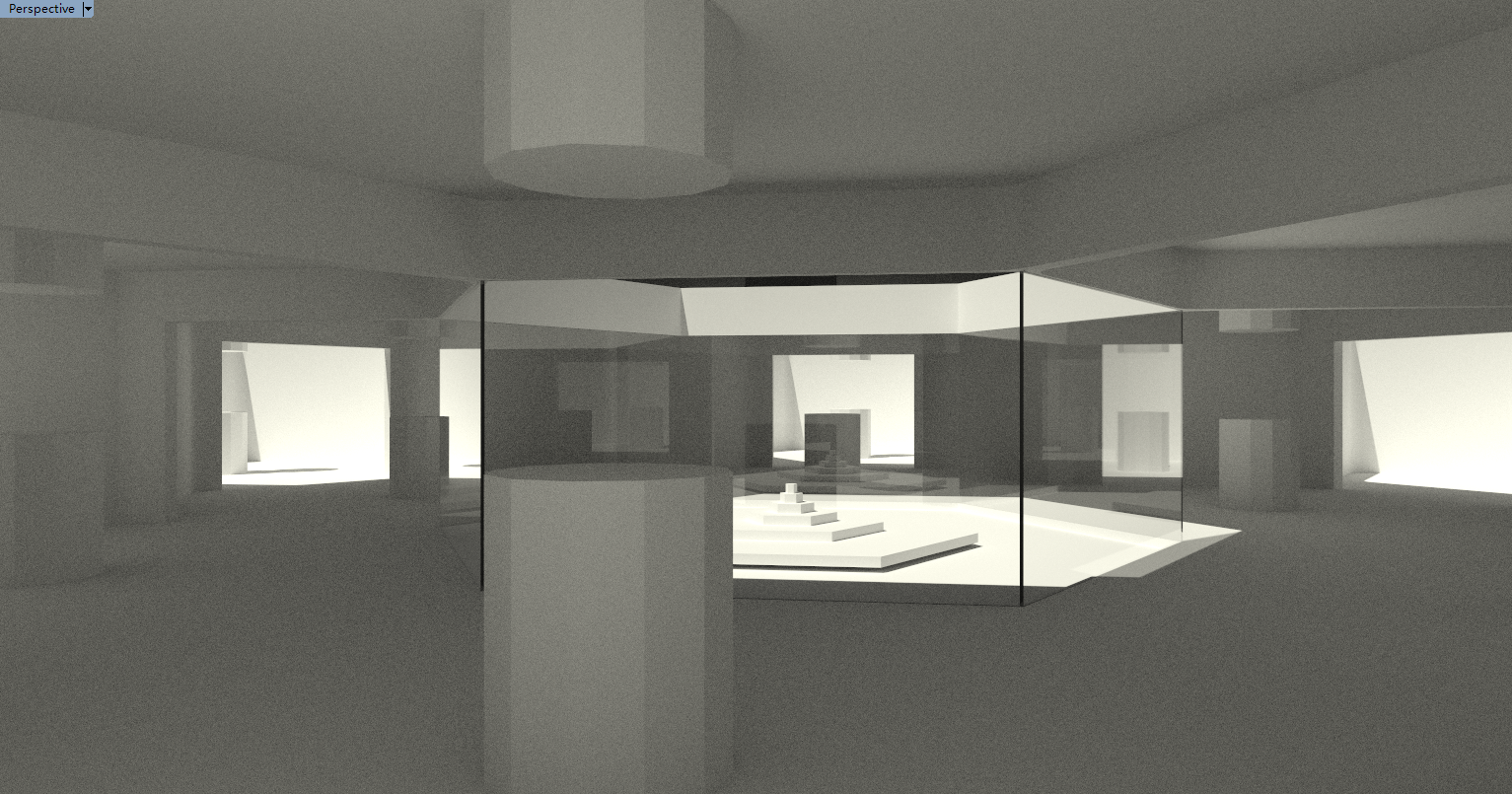

在进行这些内容设计之后,设计者可以邀请朋友等其他人,在有限的物理空间内去完整的体验该设计者设计的空间,去分享,反馈,以全沉浸的视角共同讨论设计与体验。这种设计内容上的自由度,也是我们的算法想要达成的目标。
在这个阶段,我们也从头开始接触Unity这个使用非常广泛的设计引擎。学习它的基本运作原理和各个功能之间的协同工作方式,比如模型导入与UV材质贴图调整,Lightmap渲染与参数设置,基础C#代码编写来实现一些简单的粒子效果和互动。同时我们也广泛浏览了Unity插件商店的各种功能插件,并不断筛选出适合我们的应用场景的部分,嵌入到我们的场景中。可以说这个阶段是我们项目比较艰难的时段。这种艰难出于对未知的不确定,以及由于这种不确定性带来的时间规划的不稳定。可以说这个刚起步的阶段是摸爬滚打走了各种弯路过来的。
但是幸运的是,当我们从Unity官网的Documentation和Tutorial的板块了解了很多基础功能的底层原理之后,我们渐渐掌握了优化工作流的方法。在这里我们也要特别感谢我们的第一责任导师Matt Jacobs。他作为Nexus创意公司的创意总监,和Google,Microsoft,Apple有很多密切的合作关系,他在最初期就对我们应该如何获得期望的设计效果的方法做出了很有帮助的指导。
这种具体的使用总结起来就是,找到想要的效果包之后,你要做出最简单基本的场景进行测试,成功了解每个参数的意义后再将该效果应用到最终场景中。简单的说就是控制变量,一次只做一件事。道理很简单,但很多人因为急于求成或各种原因,并不能做到这简单的一点。废话少说,让我们进入3D空间放大阶段。
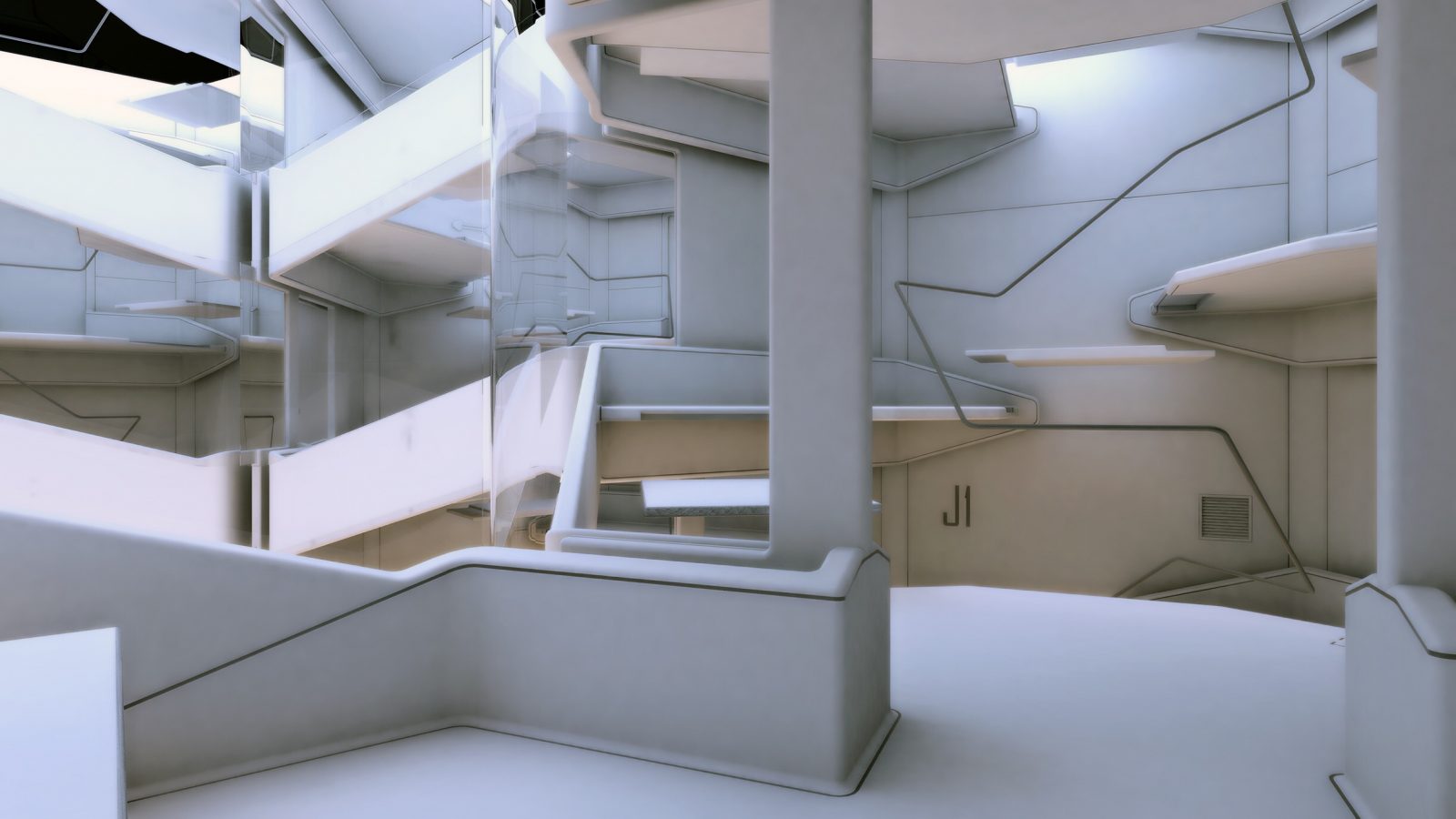
2D空间放大+垂直扩展 = 3D空间放大阶段:
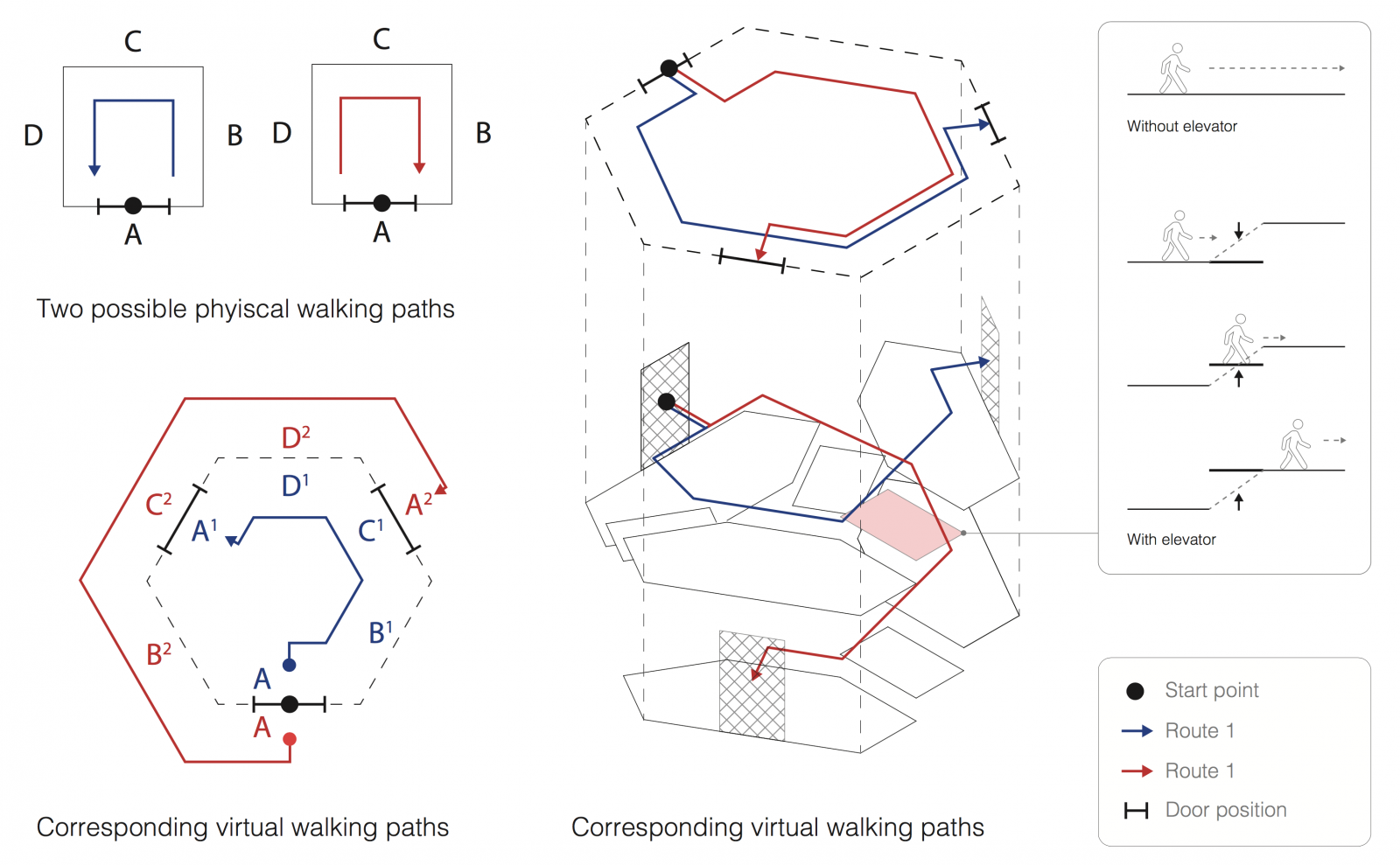
在这个阶段,我们加入了电梯的元素。它是实现人在三维空间中上下行走的方式。它的运作方式是动态判断参与者在虚拟空间中与电梯的相对位置关系和距离,来判断电梯自身的移动与否以及速度。这样的方式可以保证电梯的运动与人的物理运动会一直处于同步状态,这样可以使人视觉上看到的虚拟空间中的移动感觉与身体实际的移动状态匹配,不会出现身体静止状态下突然的加速度,导致极大的不适感。而且这种随动机制的另一个意外惊喜是,很多体验者,包括我们作为开发者自己体验本身,会有很多人反馈说虽然知道自己是在平地上行走,但是身体以及脚步真的会有很真实的被抬升的感觉。这种感觉很诡异,也很奇妙。

通过电梯的引入,4x8m的空间不再仅仅被放大为6个六边形,而是6xN层六边形。而且我们做到了的是,所有层中每个房间都是可以通过实际行走去到达的。
可以说,这样的空间是可以大大节约空间成本的。在这里我们用巴特莱特建筑学院的B-Pro Show作为例子来说明这种无限空间具体应用的可能性。在真实的B-Pro展览准备阶段,因为场地的限制,每个小组只有很少的部分可以被展示,而且因为模型尺度不同,造成空间占用情况更加复杂。先不考虑合理性与否,只考虑空间放大的概念,那么我们其实完全可以在这个多层虚拟空间中把每个人的作品的虚拟版本做一个额外的展出,放置在不同空间中,那么这就提供了一种在物理空间短缺的语境下的相对更公平的展示作品的平台。只需要在一个4x8m的空间中,我们便可以遍览B-Pro Show上所有精英思想,也可以提供给更多设计师公平展示的平台。
以上是我们在用最易懂的方式去解释这种无限空间具体应用的可能性,只代表我们的主观观点,更多的可能性还有待发掘。
在我们目前版本的多层虚拟空间互动体验中,我们暂时自己给每个房间布置了可交互的动态元素,比如房间中央的几何体会在参与者注视它的时候迸发出漂浮的元素。

以及通过特定的门之后进入另一个大空间的多感官场景交互。这些交互有虚拟场景针对视觉注意力做出反应的交互,也有识别参与者语音产生的场景元素动态交互,还有通过Leap Motion识别手部动作的体感互动等。这些交互目前由我们添加入场景中去作为上文提到的空间展品,也是为了帮助我们研究不同感官的虚拟和物理交互是如何作用于参与者的。以及参与者在虚拟环境中,视觉注意力是如何分配的。这样也有助于我们进行人在虚拟环境中的行为与物理环境中的区别和联系。

在目前已有的交互中,我可以拿其中一种视觉和声音交互结合的场景来进行举例说明我们指的交互是如何进行的以及它对于参与者的影响是如何的。下图是参与者可以通过一道传送门到达的一个世界,这个世界中在空中飞舞着一只“凤凰”在追逐一颗,嗯,球。(What?凤凰?追逐个球?不这不是重点,请再次忽略天马行空的设定)

当参与者没有看着它们的时候,它们只会沿着固定轨迹在空中围绕玩家盘旋,但一旦人们把视线注意力放到它们范围内时,它们会立刻朝向玩家聚拢过来。这样做是为了创造一种人和虚拟环境之间的亲密和可反馈的关系,让参与者感觉他们的行为在虚拟世界中也是可以获得和真实世界一样的合理反馈的。有一种虚拟世界也是有真实生命的主观感受。这种使人的行为可以通过机器语言来写定相应元素(这里是凤凰)做出反应的条件以及反应的互动方式,也是交互建筑在VR/MR/AR语境下的一种基础形态。

这里放出我们针对该场景制作的宣传纪录片。(视频)
https://v.qq.com/x/page/e05577y7j37.html
打破单调六边形空间的自由空间:
在上个场景制作完成后我们在Bartlett Summer Show 期间,开放体验了该版本,并获得了很多对我们下一步发展算法和空间有帮助的反馈。这些反馈包括内容上的以及感官上的。最主要的反馈在于大家确实会以为空间被极大的放大,而且在虚拟空间中时间越久,这种虚拟空间的真实感以及物理空间的不相关性就越强烈,用VR领域很流行的词汇就是,沉浸感越来越强。但是问题也是有的,首先六边形感觉强烈,所以即使有无限个房间,但是这种空间的单调性有时会让参与者感到自己在重复一种行走行为,空间识别度不是很强烈,以至于情绪上的变化并没有太完整的故事性,剧情是片段的拼凑。
基于以上以及其他参与者反馈以及我们积累的制作场景和优化算法的经验,我们给算法添加了一种新的特性。
简单的说,就是我们可以在4×8的物理空间中自定义两个算法开关的位置,当玩家经过这两个点时,就会切换算法的开关状态。这样在进行物理空间向虚拟空间映射和生成时,算法关闭区域的映射规则和算法开启区域是不同的,前者将进行1:1映射,玩家在此区域内不会被算法误导行走方向和角度,而后者将根据我们设计的映射比率,进行相应尺度的变化生成对应的虚拟空间。通过改变算法开关的位置,我们就可以获得平面形态完全动态变化的空间。我们目前为了快速根据这样的想法生成空间并制作内容进行测试,选取了几个特殊角度和位置作为开关去穷举可以获得的虚拟空间单元种类,建立了一个空间数据库如下图。
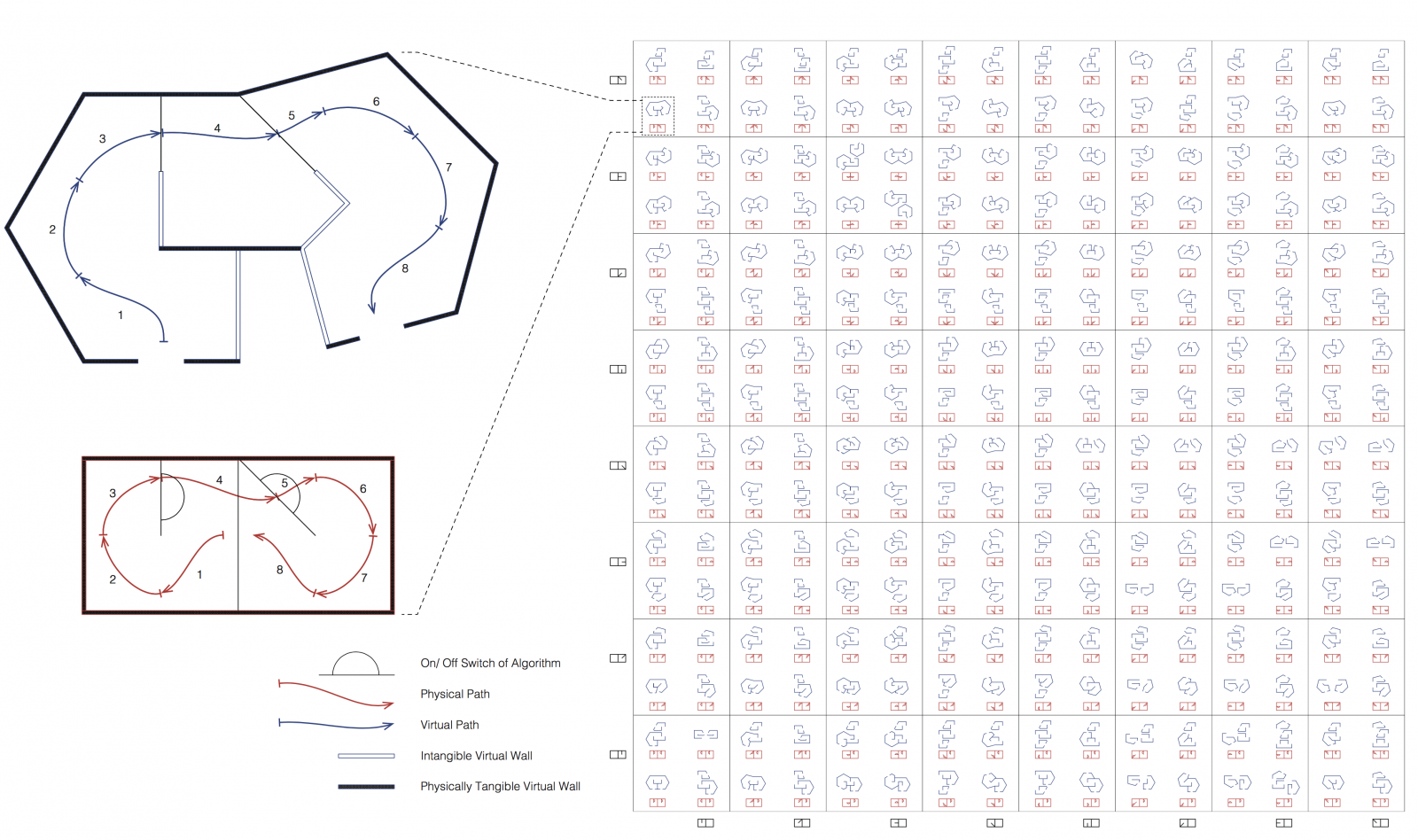
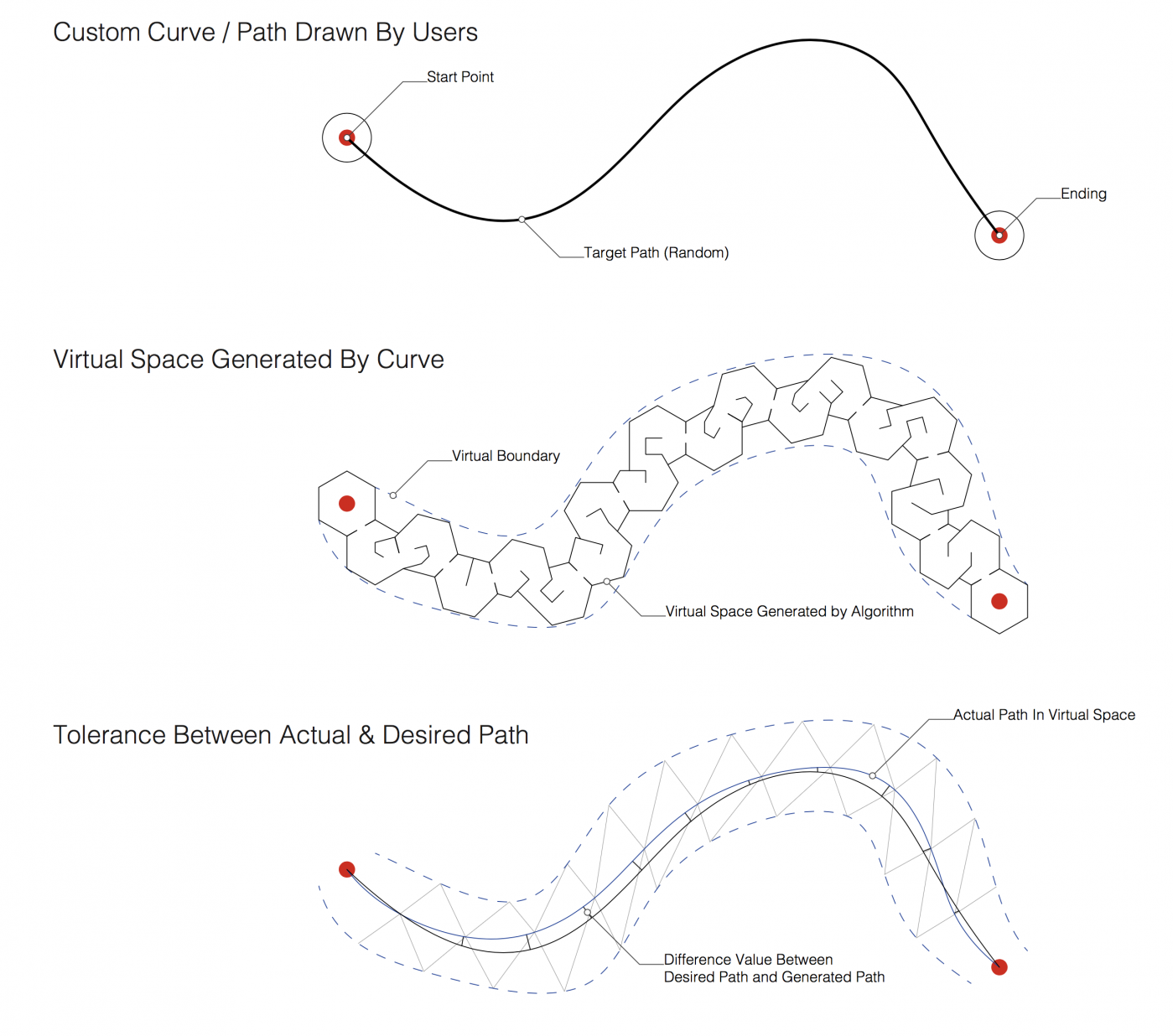
从这个数据库中我们选取了几个空间,进行了空间序列的随机组合。这种选择的过程也是我们希望算法可以给内容设计者提供的。当算法足够成熟之后,我们希望达到的效果是设计师可以根据自己设计的路线,比如画一条路径曲线,算法就可以自动根据曲线切线方向和长度,从数据库中找出最能拟合曲线路径的最佳体验空间类型,连接起来快速形成可以行走的空间序列。至于每个空间内的具体功能和互动方式,自由权完全给予设计师或团队去按需设计。如果想要修改空间边界形状的话,也可以做到,这个要看设计者希望保留多大程度的触感匹配,自由度依然是很高的。
目前,我们从数据库中选取了一系列空间,根据算法的运算原则,并修改了部分边界形状和空间尺度后重组成了一套新的空间体验。在这个新空间中,我们目前定义它是一个逃脱禁锢的游戏体验。玩家将身处一个封闭的房间中,在游戏过程中需要躲避移动探照灯的照射,看准时机通过危险地带继续前进,最终去发现他们身处的世界的秘密和结局。在这里我们在Unity中调整了光效,创造了一种黑夜中的未来工业风的破败大尺度的城市场景。在所有主要空间中,我们甚至还充当了打光师,去使用光线进行前进路径的视觉引导并渲染一种神秘的场景氛围。
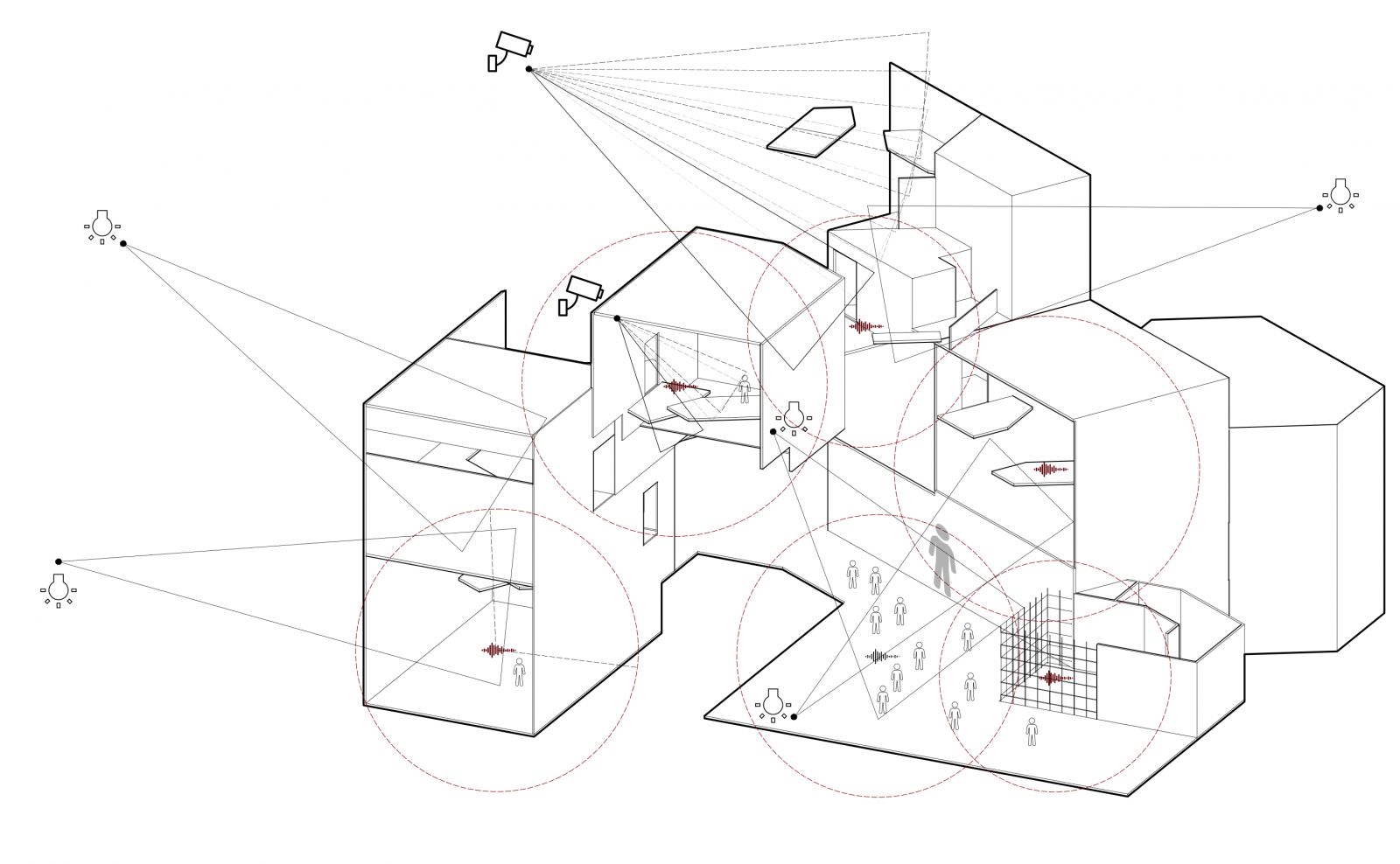
其实我们还设计了被光照射后的惩罚措施,比如空间的扭曲,眩晕或者噪音等等。并且借助Steam Audio的帮助,我们可以给场景中的每个物件创建独特的音效和环境背景音。上一个多层六边形空间体验中我们有进行这样的具体设计,但后来决定在现阶段的游戏体验中不做那么深入,而是把重心放到算法优化。因而目前的体验内容更像是一段默片的空间旅程,去置身建筑环境之中去观看与体验,并感受算法带来的空间误导的感觉。


视频宣传片在此:
https://v.qq.com/x/page/g0556bqdzhw.html
在前几天的B-Pro Show期间,我们在巴特莱特建筑学院五楼进行了现场演示。以下是一些体验照片。(以下三张是Space Popular两位创始人前来体验)



其他玩家体验如下。



在Super Crit上,Simulacrum项目的Idea引起了在场评委的热烈讨论,更是在现场直接得到了Zaha Hadid Architects老大Patrik Schumacher的一句“You’re definitely hired!” 以及亲手递给三人的本人名片。
在学生生涯结束后,我们三人准备以这个项目作为开端回国继续合伙搞事情,把这个算法继续发展下去并希望对建筑和设计领域发掘具有前瞻性的服务与工具。
目前,我们的项目即将参加十月十九日由British Council等大型机构在上海联合举办的The Best of British大型展览,展出英国设计,艺术,技术创新领域的杰出作品。Simulacrum的项目受到了组委会的高度认可,特别邀请希望展出我们的作品。
在同年十二月,我们也会在深圳参加2017深港建筑双年展。
目前,我们正在与Zaha Hadid Architects约具体时间面聊我们的项目,希望获得一些发展的建议与Idea。以及在以后互相建立合作关系,做出更好的内容,为推动科技改变设计与生活出一份力。
项目前景:
我们目前的想法是将算法变得自动化和更佳用户友好,可能今后把它发展成为一种服务或产品,设计师并不需要知道背后复杂的原理,只要知道自由度与设计规则,便可以发挥自己个性及所长设计出优质的MR(混合现实)体验内容。
我们希望做的,不是设计出可以称霸热搜榜的游戏App或设计竞赛的头奖。而是为设计过程打开一条新的途径。做1而不做0。
这套算法,我们设想可能的应用领域,总结起来就是希望获得大空间体验而物理空间有限的环境。比如密室逃脱的空间互动体验,以及艺术博物馆的数字化观展体验,还比如医疗领域比如治疗自闭症,恐高症等等。
回国后,我们还将筹备一场设计竞赛,来在有限空间内公平的展示所有参赛者的设计作品。对于吃瓜群众来说,他们可以获得有限空间无限行走的能力,对展示本身来说,又给作品展示提供了一种全新的解决方案。
混合行走空间映射算法在MR (混合现实)中只是冰山一角,当混合现实不再只是一种大家感觉新奇的事物,而是日常使用的生活一部分,它终将影响人们设计与使用空间的方式。
这个领域更多的可能性还需要更多设计师而非纯程序员的参与,来更多从感性和心理学的方面去一同发掘混合现实的潜力。
如果需要了解更多我们的信息,可以持续关注我们的官方网站:www.configreality.com
也可关注脖子哥微信(liuliquan81),后期会有公共号,来提供该项目的最新进展和活动策划信息。脖子哥有一项伟大的计划是有朝一日和巴院以及AA等高校合作办一场极限空间下的B-Pro Show。也敬请期待。